장웅준 상무 키노트서 기술소개
내년 서울서 ‘레벨4’ 시범서비스
엑시언트 기반 로보트럭 개발도

“손을 놓고 주행할 수 있는 레벨3 수준의 고속도로 자율주행 기술을 내년부터 양산하겠다.”
현대자동차그룹 연구개발본부 자율주행사업부 장웅준(사진) 상무가 10일 온라인으로 열린 ‘2021 HMG 개발자 컨퍼런스’ 키노트 발표에서 ‘스마트 모빌리티 디바이스’ 기술을 소개하며 이같이 밝혔다.
SAE(Society of Automotive Engineer·국제자동차기술자협회) 분류 기준에 따르면 ‘레벨3’ 수준의 자율주행은 조향 및 가·감속 장치를 주도하는 운전자의 탑승 하에 시스템이 주행 기능을 대신 수행하는 단계다. 조건부 자율주행 단계인 ‘레벨4’에서는 특정 도로 조건에서 모든 주행 기능을 차량이 담당한다.
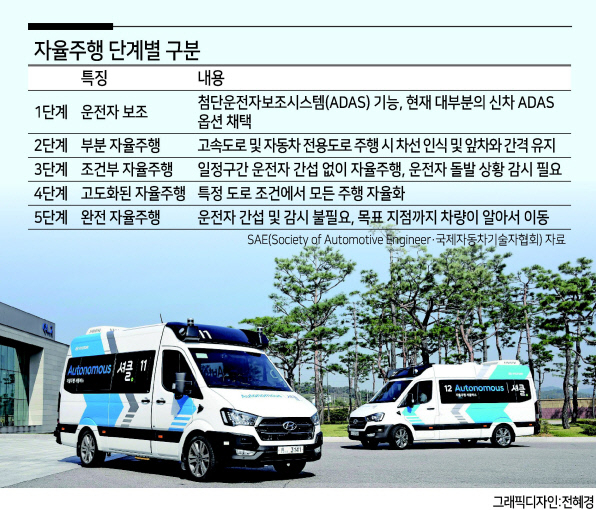 |
| 남양연구소 내부에서 시범 운영 중인 로보셔틀. [현대차그룹 제공] |
‘레벨3’ 수준의 자율주행 기술이 적용될 모델은 내년 본격적인 고객 인도가 이뤄지는 ‘제네시스 G90’ 신차가 유력하다. 운전자 없는 자율주행을 일반도로에서 성공적으로 시험 주행한 ‘모셔널(Motional)’의 기술력을 일반 차량에 구현한 첫 사례가 될 것으로 전망된다.
현대차는 부분 자율주행보다 진화한 ‘레벨4’ 수준의 기술을 2024년 현실화하는 것을 목표로 하고 있다. 서울과 남양 등에서 이뤄지는 실증 사업을 바탕으로 로보택시와 상용차에 우선 적용하는 방안을 내부적으로 검토 중이다.
장 상무는 “현재 레벨4 수준의 자율주행 기술을 자체적으로 연구 중”이라며 “이와 관련해 최근 출시한 전용 전기차 아이오닉5 기반의 무인 자율주행차를 내년 서울에서 시범서비스를 할 계획”이라고 설명했다.
현재 구현 가능한 자율주행 인식기술은 전방 카메라와 레이더(Radar), 라이다(Lidar)가 조합된 ‘2단계 센서퓨전 시스템’이 핵심이다. 전방 차량 충돌회피와 주변차량을 인식하는 1단계에서 더 나아가 차로 내 정지 장애물과 근거리 끼어들기 차량을 인식하는 성능이 개선된 것이 특징이다.
현대차그룹은 내년부터 자율주행 통합제어기 개발에 매진할 계획이다. 고성능 프로세서를 활용해 자율주차 기능을 고도화하고 딥러닝 기반의 영상 인식을 통한 안전성 개선에 중점을 뒀다. 로보택시와 셔틀버스, 물류트럭 등에 적용해 ‘삶의 질’을 개선하는 중장기 전략이다.
장 상무는 “쏠라티 기반의 로보셔틀을 개발해 지난 8월부터 9월까지 세종시에서 시범서비스를 성공적으로 운영했다”며 “10월부터는 현대차 남양연구소 내에서 시범서비스를 진행 중”이라고 말했다.
이어 “엑시언트 기반의 로보트럭을 물류 배송 등 분양에서 활용할 수 있도록 개발하고 있다”며 “여러 차량을 활용해 자율주행 기술을 동시에 개발하는 건 자체적으로 소프트웨어(SW)를 공용화할 수 있어 가능했다”고 덧붙였다.
산업은행이 조사한 국내외 개발 현황에 따르면 자율주행차는 2021년 약 5만대에서 2040년 약 3300만대로 가파른 성장세를 보일 것으로 전망된다. 한국과학기술정보원(KISTI)이 추산한 2025년 자율주행차 시장 규모는 370조원에 달한다. 특히 센서, 소프트웨어를 포함한 제조비용이 기존 자동차보다 낮아지는 2025년 이후 보급률이 급증할 것으로 관측된다.
연구개발본부 알버트 비어만 사장은 “지능을 갖춘 차량의 강력하고 안전한 연결성은 기존 차량을 훨씬 뛰어넘는 완전히 새로운 이동경험을 제공할 것”이라며 “지구에 최소한의 영향을 미치는 순환경제 속에서 소유와 공유에 이르는 전 과정을 아우르는 새로운 네트워크 개발에 전념하겠다”고 강조했다. 정찬수 기자
andy@heraldcorp.com