- 전임상 실험 통해 실제 심혈관계 중재시술이 가능성 확인
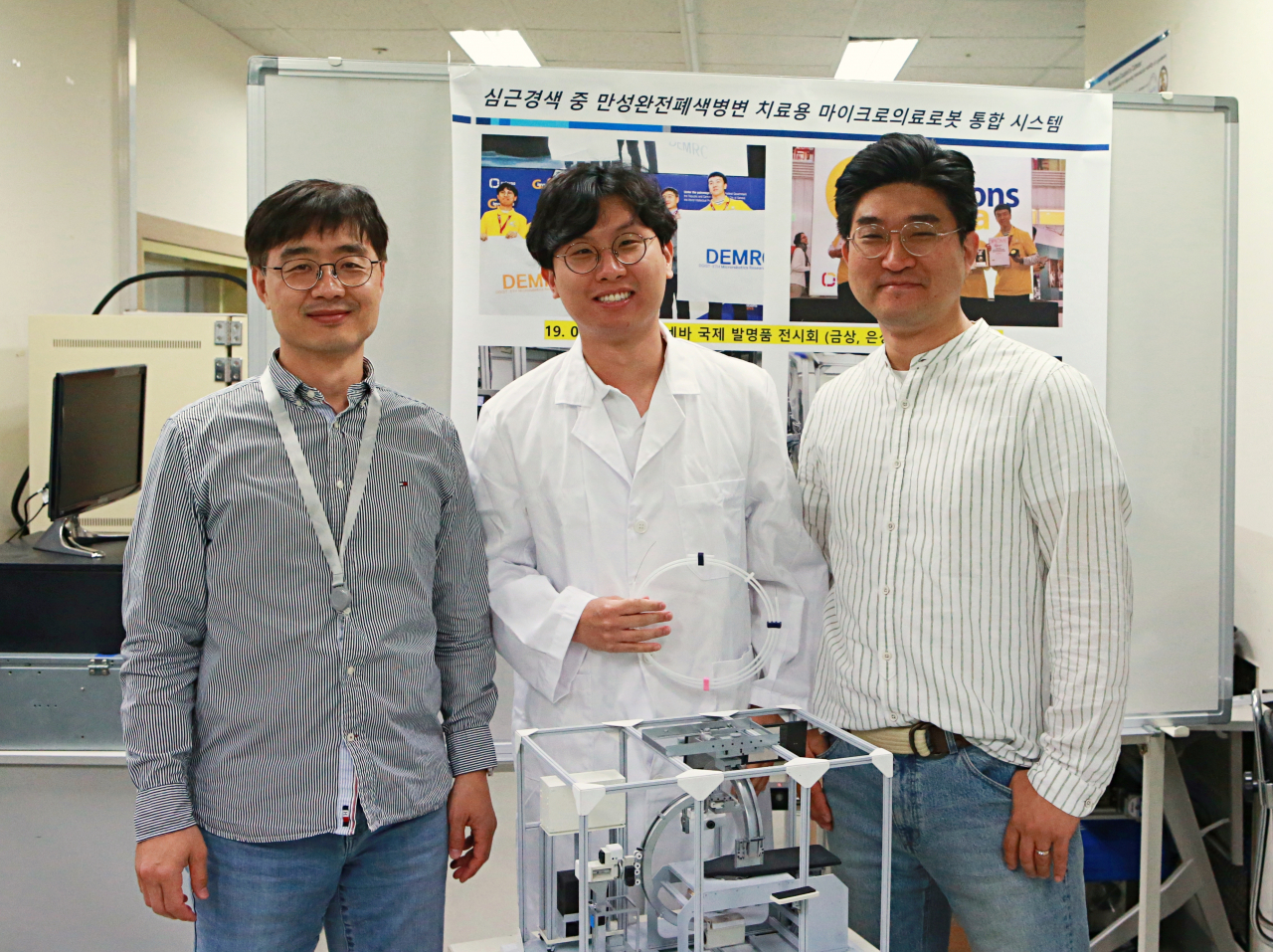 |
| 왼쪽부터 최홍수 교수, 황준선 연구원, 김진영 선임연구원.[DGIST 제공] |
[헤럴드경제=구본혁 기자] 좁고 복잡한 혈관중재시술에 사용되는 기존 밀리미터 크기 의료로봇의 한계를 극복할 수 있는 핵심 원천기술이 개발됐다.
대구경북과학기술원(DGIST) 로봇 및 기계전자공학과 최홍수 교수 연구팀이 한양대학교, 분당서울대학교병원, 가톨릭대학교 서울성모병원, 스위스취리히연방공대와 공동연구를 통해 목표병변까지 빠르고 안전하게 위치시킬 수 있는 ‘자기장 기반 정밀 제어 마이크로로봇 혈관 중재시술 시스템’을 개발했다고 9일 밝혔다.
최소칩습적 치료법인 혈관중재시술의 경우, 피부를 미세하게 절개한 후 와이어 형태의 시술기구인 가이드와이어(유도철사)와 카테터(도관)를 삽입해 막힌 혈관 부위를 X-ray 영상으로 관찰하며 진행하는 시술이다. 하지만 시술자의 숙련도와 전문성에 따라 시술 성공률의 편차가 크고, 특히 환자의 혈관구조가 복잡할수록 수동으로 가이드와이어와 카테터의 방향을 정확하게 제어하기 어렵다는 한계점이 존재한다. 특히 이러한 시술을 주기적으로 시행하는 의료진은 X-ray 방사선 피폭량에 지속적으로 노출된다는 문제점이 있다.
최홍수 교수 연구팀은 이러한 기존 중재시술의 한계를 극복하기 위해, 유연 자성 가이드와이어 마이크로로봇, 수술용 침대와 결합된 8개의 전자기 코일 기반 자기장 제어 시스템, 바이플레인 X-ray 영상 시스템 및 마스터 슬레이브 시스템이 통합된 전자기 제어 마이크로로봇 혈관 중재시술 시스템을 개발했다. 시술자는 전자기장을 인가하여 가이드와이어 마이크로로봇이 자기장 방향에 따라 정렬하는 원리를 이용해 원하는 방향으로 가이드와이어를 정밀하게 제어할 수 있으며 제어각도 90도 이상의 3차원 조향이 가능하다.
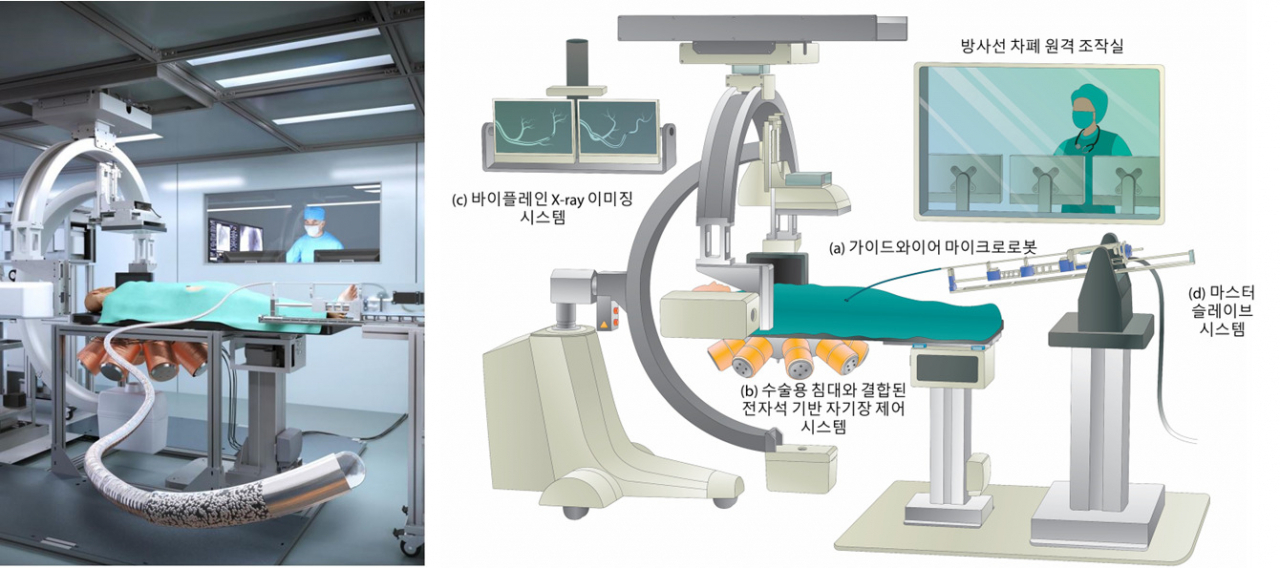 |
| 전자기 제어 마이크로로봇 중재시술 시스템 개념도.[DGIST 제공] |
연구팀은 전자기 제어 마이크로로봇 중재시술 시스템의 임상적 유효성을 확인하기 위해 돼지모델에서 전임상 동물실험을 진행했다. 원격 자기장 제어를 통해 돼지 심장의 관상동맥 내에 위치한 다수의 목표병변에 선택적으로 가이드와이어 마이크로로봇을 성공적으로 위치 시켰으며, 개발한 시스템이 실제 심혈관시술에 사용될 수 있음을 확인했다. 또한 장골동맥, 신장동맥 환경에서 목표 위치까지 성공적으로 도달함을 확인, 심혈관 이외에도 간, 뇌 등 다양한 혈관에 적용될 수 있음을 증명했다.
최홍수 교수는 “전임상시험 수준에서 개발한 기술의 장점 및 잠재적 임상적 유효성을 확인할 수 있었다”라며 “앞으로 기술의 고도화 및 최적화 연구를 통해 최종적으로 의료기기 승인을 받아 실제 의료현장에 활용 될 수 있도록 노력하겠다”고 말했다.
이번 연구결과는 국제학술지 ‘어드밴스드 헬스케어 머티리얼즈’ 표지논문으로 선정돼 6월 8일 게재됐다.
nbgkoo@heraldcorp.com